|
2002年8月6日(火)
■PDS-2143FET
腕のサーボをPDS-2143にとりかえてみたが、かなりつらい。起き上がりれないことを想定して対策をしなければ…
■足裏
起き上がれないなら、倒れにくくしよう。足裏をひと回り大きくする。この足裏では階段のぼりは絶対にできない…。写真左はイトーレイネツ純正。もうぼろぼろである。
|

頑張れメタファイ
Metallic Fighter 2002 |
2002年8月7日(水)
■起き上がり2
上半身の構成を決定 肩(2144)→腕(2144)→手(2143)。足裏をひと回り大きくする。この状態で起き上がりに挑戦。見てやってください。
起き上がり動画1、起き上がり動画2(前回公開したもの)
■日付がずれていた
日記の日付がずれていた。1日とくした気分。さあ、ラストスパート
■歩行
実はまだ、ちゃんとした歩行ができていない。剛性問題で片足立ちになったとき、あげた足がもうひとつの足にひっかかってしまうのだ。なんとかしなくては… 今日の目標はまともな歩行。よちよち歩行動画 |
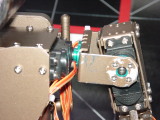
サーボ交換

原点がずれないよう
印を付ける

サーボ取り出し
20個近くのネジをはずす
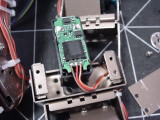
サーボの裏蓋をはずし
半田ごてで配線をはずす
新しいサーボを逆順
で取り付ける |
2002年8月8日(木)
■モチベーション低下中
疲れた。ここは無理せず、自然にまかせる。日曜日がベストになるよう調整していこう。
■CPUユニット発注
今年のマウスにつかうCPUユニットを注文した。今までは自作していたが、今年は市販品を使う予定。もちろんMetallic
Fighter 2002に搭載したものと同じものである。マウスは来週の月曜日から始める。
■歩行
むずかしい。歩行は誤魔化しがきかない。何か考え違いをしているようだが解らない。木曜、金曜は有給休暇。じっくり取り組もう。
■電池
電池ユニットのことをすっかり忘れていた。手持ちは4ユニット。大丈夫だよね…
1ユニットは6V 1100mA。動作時間は15分間。ただし、この時間は適当に動かした時の実測値。試合の場合は連続的に激しい動きする。はたして何分もつのだろうか…
■起床
4時ぐらいまで頑張ったが成果はなし。パンチもどきも作ってみたが迫力がない。関節が足りない。パンチだけをみると前作より明らかに劣っている。腰のサーボをなくしたのが痛い。パンチ動画
■何もしてないのにー
悪いことは何もしていない。左足の下から2番目のサーボが焼きついた。冗談はよしてくれ… どうして私のロボットだけがこわれるのか…
外は暑い。サーボも熱い。空は青い。心はブルー。
かんべんしてくれ
■2143+2174→2144もどき
2144もどきを2つ作った。ようやく修理完了。左右のサーボの特性がばらつくをこと懸念して右の正常なサーボも、もどきと取り替えた。これでサーボの予備がひとつできた。さあ、頑張るぞ。
■オークション
某オークションに2144が出ていることを「のんさや」さんに教えてもらうが、いまいちやり方がわからない。登録まではできたのだが、入札しようとすると、Yahoo!ウォレットへの登録画面になり先に進めない。ヘルプを見る限りそんなことは書いていない。Yahoo!ウォレットに入らないと入札できないのだろうか?入札終了まであと4時間。困った…
■あと一日
動かせば動かすほど、次回のロボットの構想が湧き出てくる。作りなおしたい… |
|
2002年8月9日(金)
■戦いを前にして
Metallic Fighter 2002 も皆様の声援のおかげでここまで成長しました。
5月の連休から作り始め、途中で何度も挫折し、そのたびにいろいろな方から助言やサポートをしていただき本当の感謝しています。また、家族の支えがなければここまでこれなかったでしょう。特にかみさんのきびしい… おっと口は災いの元…
いよいよ戦いは明日。最後のブラシアップをおこないます。最後のお願いです。壊れないことをみなさんで祈ってください。よろしくお願いします。
■暑い、熱い、暑い
現物あわせの動作パターン作りは危険と隣あわせ。無理な姿勢を長時間続けようもなら、あっという間にモータが焼けてしまう。正直言って怖い。何もしたくない。
でも、妥協もしたくない。1日あれば、必ず1日分進歩する。新しい動作を憶えるのも進歩。壊れるのも進歩。悔いは残したくない。前進あるのみ。
■怖い
5分動かして1時間休憩を繰り返している。5分でやめるのはモータが熱損傷するのを防ぐため、1時間休憩が必要なのは、壊すのではないかという恐怖を、やらなければならないという気持ちが上回るのに必要な時間。そろそろ電池駆動でテストをしなければならないが、まだ動作パターンが全てできていない。電流制限のない電池は怖い。
■身体測定
最終スペックを計測
体重:2200g 身長:360mm 肩幅:230mm 厚み:130mm
■無線テスト
今頃であるが、水晶モジュールをつくり、3つの周波数で制御できることを確認。これで大会参加規定をすべてみたす。
■歩行がかっこ悪い
だめだ、こんなのじゃ。
■階段のぼり
今回は残念ながらあきらめる。今から登録抹消できるかなー。
階段上りができないと判断できるようになっただけでも進歩としよう。
■戦闘準備完了
戦闘準備完了。というより強制終了。これから、電池の充電に入る。欲を出したらきりがないが、やるだけのことはやった。あとは私がベストを尽くすのみ。久しぶりに満足感を味わっている。さあ ビールを飲むぞ。 |
 |
2002年8月10日(土)
■予選4位通過
予選通過16台のうち4位の成績で通過。ほっと一息。
予選では右手首のコントロールが切れてしまい、起き上がりをお見せすることはできなかった。残念である。
■4時まで作業
決勝を勝ち抜くため、不安要素は払拭しておかなければならない。Metallic
Fighter 2002を解体して、主要なコネクタを全て作りなおした。吉とでるか凶とでるか。明日になれば全てがわかる。
|
 |
2002年8月11日(日)
■優勝
勝ったー。全てを燃焼しきった瞬間だった。拍手の渦が私を暖かく包んでくれた。戦い終わったMetallic
Fighter 2002 は傷だらけだったが、誇らしげに宙を見つめていた。今夜はゆっくり休んでいいぞ。
|
|
2002年8月12日(月)
■関連記事
PC Watch ZDNet
■リハビリ
決勝トーナメント4試合を戦った機体はボロボロ。緩んだネジを締めて再調整。次の機体を設計するために、いままで怖くて手をつけていなかった動作に挑戦してみる。
もう少し休んでからとも思ったが、忘れないうちにやっておこう。
|

撮影:B作氏
左:ガングー 右:韓国 |
2002年8月13日(火)
■機動力
松川さんのガングーに惚れる。やっぱり機動力のあるロボットは見ごたえがある。次の目標が少し見えてきたような気がする。とりあえず、次のステップのために足を高く上げる動作パターンを作ってみる。
|

撮影:B作氏 |
2002年8月14日(水)
■RoboOne
ASCII24にRoboOne記事が掲載された。
■サーボ
大会が終わったのに、連日起き上がりを披露している。
右手首が硬くなってきた。やはり消耗品なのだろうか。サーボが焼ける日は近い。 |