■散策
久しぶりに秋葉原を散策。ショーケースの前で1時間。悩んだあげく、意を決して部品購入。肝心の充電器用の部品を買い忘れた。講座用の写真がとれない。
買い物:5時間 構想:6時間

■爆走中1
部品加工に明け暮れた1日。試行錯誤を繰り返しながらの試作。矛盾との戦い。部品を切り出すたびにイメージが固まっていく。
ロボット工作:16時間 家事手伝い:邪魔をしただけ

■爆走中2
大会まであと2週間。作り初めて3日目。動くものが無ければ話にならない。作りまくる。
ロボット工作:22時間 家事手伝い:邪魔をしただけ

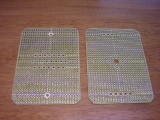
初心者講座用CPUボード

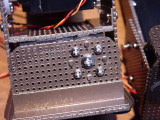
25サーボコントローラ
コネクタ
■思考中1
下半身の試作は物理的には完了。上半身を作る前に、動作チックをしてみたい。取りあえず手持ちの2CHのラジコン送信機で右足の2箇所を動かしてみる。
ゴトッ!床に転がる。家族の失笑を買う。今に見ていろ…
転がったということは、体を持ち上げようとしたことだ。トルク的にはいけてそうだ、そうなると13個のサーボモータをすべて動かしてみたくなる。コントローラが必要だ。本来ならFPGAで作るところだが、今からそんなことをしていたら間に合わない。(もともと間に合うはずがないのだが)。そうだ!初心者講座で用意しているCPUボードがある。これを使えば一石二鳥だ。Tinyで25個のラジコンサーボ用コントロール信号をジッタなく作る方法を考える、考えろ、考える。
よし!この方法でいくぞ。今だけでいい1日を30時間にして欲しい。
ロボット工作:4時間 家事手伝い:0時間
2002年1月16日
■サーボコントローラ
初心者講座用に用意したCPUボードをサーボコントローラ用に改造。改造といってもコネクタを増設しただけである。コネクタは3664ボードについてくるものと同じもの。このボードで25個のサーボモータを制御する。物ができてもソフトがなければ意味がない。これから魂を製作する。
■はたして間に合うか
得意分野で加速しなければ空白の時間を埋めることはできない。スキーも飲み会もすべて我慢。はたして間に合うか。確証はないが確信はある。

信号は設計どおり

待機中

CPUボード
■あー疲れた
意外と手間取ってしまった。秋月電子のサンプルプログラムにバグがあることに気がつかず時間をロス。H8/3048との割り込みの違いがなかなかわからず時間をロス。理解してしまえばなんてことはない。これで初心者講座は楽になる。
■スペック
今回のサーボコントロールのスペックは
○制御サーボ数25個
○サーボ周期 25msec
○サーボ信号 1.1mmsec-1.9msec
○分解能 0.5usec
■チェック
さっそく、サーボモータを接続。PC上ターミナルからRS232Cを介して各サーボに指示を与えることができる。オシロでジッターを確認。サーボ信号25本すべて問題なし。電源を入れるとサーボがセンターまで回転、停止。1.1msecを設定。右回転、停止。いいねいいね。1.9msecを設定。左回転、停止。よっしゃ! ん!ちょっとまてよ!
■問題発生
よく見ると、サーボは±60度くらいしか回転していない。もう一度パルス幅を確認。設計どおり。ということは±90度まわすためにはサーボ信号の幅を増やさなければならない。設計限界値は1.02msec-1.98msec。愕然!さーどうする。経験がこの問題の重大さをささやく。
ロボット工作:6時間 家事手伝い:0時間




■ラジコンサーボ
サーボ信号を750usec-2250usecにすることで、関節に必要な回転角を確保。制御プログラムを変更。この方法では管理できるサーボモータの数はCPUボード一枚あたり12個であることを確認。時間がないのでこれ以上追求しない。
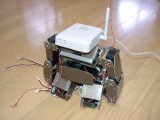
■基礎実験終了
下半身がついに自立した。外部電源、外部コントロール、立っただけで歩きはしないが久しぶり充実感に浸ることができた。
■制御回路
制御回路の方針決定。初心者講座で使う秋月電子のTiny3664ボード(1600円)を2枚使いデュアルCPU構造にする。ひとつのCPUで最大12個のサーボモータを管理する。
■上半身
上半身の構造決定。当初の予定より自由度を減らす。お飾りにならないように、全体の動きと手の動きを想像しながら決定
■頭
こにらも当初予定していたより自由度を減らす。頭を動かすときは体全体を使って表現することにする。
■デザイン
全体のデザインを再確認。太ももが気にいらない。もう少し手をいれよう。
■自由度
最終的な自由度は片足6自由度、片腕3自由度、頭1自由度の計19自由度とする
■スケジュール
土曜日に買出しおよび工作、日曜日に物理的完成を目指す
■操縦装置
すっかり忘れていた。コントローラはどうしよう…
■原動力
「本当に間に合うのか」「無理じゃないか」と言われるたびに、力が沸いてくる。私の原動力は言動力。
つまらないこと言ってないで手を動かせ。はいはい。
■問題点整理
○CPUボード間の通信(4ビットパラレル通信を検討中)
○電池の取り付け位置と充放電回路(足の裏・背中・胸 検討中)
○操縦装置(赤外リモコンか無線。時間を考えると赤外か?)
○上半身の作成(19・20日の土日が勝負)
○歩行アルゴリズム(勉強もしていない、お手本は自分自身)
まだまだ楽しめそうだ。
ロボット工作:2時間 家事手伝い:0時間