| 俀侽侽俁擭俁寧侾擔乮搚乯 |
仭妋掕怽崘
丂妋掕怽崘廔椆丅崱擭偐傜崙惻挕偺儂乕儉儁乕僕偐傜怽崘梡巻偑偮偔傟傞傛偆偵側偭偨丅戝曄曋棙偱偁傞丅婥偑偮偔偲徚偊偰側偔側偭偨桪彑徿嬥丅惻嬥暘側傫偰巆偭偰偄側偄丅僺儞僠丅
仭儖乕儖懜庣
丂戞係夞俼俷俛俷亅俷俶俤戝夛偺儗僊儏儗乕僔儑儞偑敪昞偵側偭偨丅嫞媄夛偱偁傞埲忋儖乕儖懜庣丅懌棤偺掕媊偑曄傢偭偰偄側偄丅崱搙偙偦儖乕儖偓傝偓傝偺懌棤偵偟傛偆丅帺棩惈傪廳帇偡傞傛偆側偺偱惂屼宯偼堦怴偡傞偑婡懱偼巊偄夞偟偑偱偒偦偆偩丅傎偭偲堦埨怱丅弶婜搳帒偼儕儈僢僩側偟偱峴偭偨丅塱偔懕偗傞偨傔偵崱屻偼偄偐偵僐僗僩傪偐偗側偄偐偑彑晧偵側偭偰偔傞丅偪傚偭傄傝巇帠傒偨偄丏丏丏
仭倴倱丂偐傢偝偒儘儃僢僩
丂偄傛偄傛俀廡娫慜丅俀寧偼廩揹婜娫偩偭偨偨傔丄戝岥傪扏偄偨偵傕偐偐傢傜偢壗傕傗偭偰偄側偄丅乽側乕傫偩乿偲巚傢傟側偄傛偆偵婥崌傪擖傟側偗傟偽丒丒丒丅偳傫側懳愴偵側傞偺偩傠偆丅俵俥偼巜堦杮怗傟傞偙偲偱偒側偄偱丄偁偺挿偄傾乕儉偺塧怘偵側偭偰偟傑偆偺偐丏丏丏丂懱摉偨傝偱偒偨偲偟偰傕埑搢揑側僷儚乕偺嵎偱墴偝偊崬傑傟偰偟傑偆偺偐丏丏丏丂妝偟傒偱偁傞丅
仭俇俁係侽
丂晲憼岺戝偺俇俁係侽偲偺楙廗帋崌偺夣戻傪捀偔丅棃廡偵偼幚尰偟偦偆偩丅偙傟偱崱廡枛偺儌僠儀乕僔儑儞偼堐帩偱偒傞丅俼俛俷亅俷俶俤愴巑偺拞偱傕侾丆俀埵傪憟偆僷儞僠椡傪帩偭偨俇俁係侽偲偺愴偄丅峫偊偨偱偗偱傕傢偔傢偔偡傞丅
仭惂屼儐僯僢僩偺夵椙
丂傑偢偼惂屼儐僯僢僩偺夵椙丅偙偆偡傟偽愨懳傛偔側傞偲巚偭偰偄偰傕戝夛慜偼晐偔偰偱偒側偐偭偨寽埬帠崁丅偮偄偱偵揹抮揹埑傪娔帇偡傞偨傔偺僴乕僪傪捛壛丅偙傟偐傜僜僼僩傪嶌傞丅壴暡徢側偺偱奜弌偼尩嬛丅偁傞堄枴偱偼偄偄婫愡偱偁傞丅
|
| 俀侽侽俁擭俁寧俀擔乮擔乯 |
仭揹埑娔帇俴俤俢
丂偲偰傕曋棙偱偁傞丅偁傞揹埑埲忋偩偲俴俤俢傪徚偟丄偁傞揹埑枹枮偩偲俴俤俢傪揰柵偝偣傞偩偗偺偙偲偱偁傞丅俴俤俢偑揰柵偟偨傜揹抮傪庢傝懼偊傞丅偙傟偱廩揹晄懌偺揹抮偱帋崌偵弌傞偙偲偼側偔側傞偼偢偱偁傞丅
丂嶌偭偰傒偰婥偑偮偄偨偺偩偑丄柍棟側摦嶌傪偍偙側傢偣傞偲夁揹棳偑棳傟傞偨傔揹埑偑崀壓偡傞丅偙偺帪傕堦弖俴俤俢偑揰柵偡傞丅偙傟偼偍傕偟傠偄丅崱傑偱嶌偭偨偄傠偄傠側儌乕僔儑儞僷僞乕儞傪摦偐偟偰傒傞丅側傞傎偳乕丅壗傪傗傞傋偒偐尒偊偰偔傞丅
仭戞俀夞僥僋僯僇儖僇儞僼傽儗儞僗
丂島巘埶棅偑偒偨丅崱夞偼僒乕儃儌乕僞偺壜摦斖埻傪峀偘傞偨傔偺夵憿曽朄偲俵俥俀侽侽俁偺夞楬峔惉乮夞楬恾乯丄俵俥俀侽侽俁偺柍慄惂屼傪岞奐偡傞偮傕傝偱偁傞丅傎偲傫偳偑婛抦偺媄弍偱偁傞偲巚偆偑幚愴偱偳偺傛偆偵媄弍傪墳梡偟偰偄傞偐傪夝愢偱偒偨傜偲巚偆丅乮偁偔傑偱傕巹偼偙偆傗偭偰偄傞宍幃偵側傝傑偡偑丏丏丏乯
仭懌棤
丂俵俥俀侽侽俁梡偺懌棤偼尰嵼俁庬椶偁傞丅傂偲偮偼侾侽侽倣倣倶俋侽倣倣偱嵟戝挿侾侾俆倣倣偺僞僀僾俙丅俀偮栚偼侾俁俆倣倣倶俉侽倣倣偱嵟戝挿侾係俆倣倣偺僞僀僾俛丅嵟屻偼侾俇侽倣倣倶俋俆倣倣偱嵟戝挿侾俈侽倣倣偺僞僀僾俠偱偁傞丅僞僀僾俛偼摗栰偝傫偐傜捀偄偨巗斕偝傟偰偄傞傕偺偱偁傞丅偳偺僞僀僾偺懌棤偵晅偗懼偊偰傕僜僼僩僂僄傾偺曄峏側偟偵曕峴偑壜擻偱偁傞丅
丂偙偆傗偭偰夵傔偰暲傋偰傒傞偲師偵傗傞傋偒偙偲偑尒偊偰偔傞丅儘儃儚儞婯奿僊儕僊儕偺嵟戝挿俀侽侽倣倣偺僞僀僾俢傪嶌偭偰傒傛偆丅丂崱擔偺栚昗寛掕丅場傒偵懌棤偑柍偔偰傕晄埨掕側偑傜曕峴偼偱偒傞丅
仭俇俁係侽愴
丂朲偟偄拞丄僗働僕儏乕儖傪挷惍偟偰偄偨偩偄偨丅俀擔屻偺係擔偵寛掕丅妝偟傒偱偁傞丅儘儃儚儞婯奿僊儕僊儕偺僞僀僾俢偱挧愴偟傛偆丅俇俁係侽偺嫮楏側僷儞僠偱搢偝傟傞偐摜傫挘傟傞偺偐丄俇俁係侽傪傂偭偔傝曉偣傞僷儞僠傪僸僢僩偝偣傞偙偲偑偱偒傞偺偐丄丄偱偒側偄偺偐丅壽戣偼偨偔偝傫偁傞丅
|
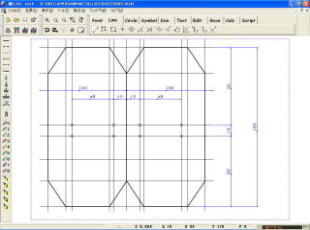 |
仭恾柺
丂僞僀僾俢偺恾柺傪嶌傞丅嵽椏偺娭學偱偪傚偭偲峊偊傔丅侾俉俆倣倣倶俋侽倣倣偱嵟戝挿侾86倣倣丅偱偐偄側乕丅
仭惢嶌拞
丂嵽椏偺愗傝弌偟姰椆丅尰嵼揾憰拞丅壖慻傒偱摦偐偟偰傒偨寢壥偼栤戣側偟丅慡偰偺儌乕僔儑儞偑摦偄偨丅屻偼怴偟偄儌乕僔儑儞偺嶌惉偲婥偵擖傜側偄儌乕僔儑儞偺廋惓偱偁傞丅婥偵側傞丄懌棤傪戝偒偔偟偨岠壥偩偑丄傑偩壗偲傕尵偊側偄丅曕峴桪愭偱嶌偭偰偄傞偨傔廳怱埵抲偑崅偄丅傕偲傕偲懌棤偼戝偒偄弌偺偱丄偙偺掱搙戝偒偔偟偰傕丄嵎偵側偭偰昞傟側偄偺偐傕偟傟側偄丅丂巆擮丅
|
| 俀侽侽俁擭俁寧俁擔乮寧乯 |
仭僞僀僾俢
丂乽懌偑戝偒偄偲娫敳偗偩偹乕乿偐傒偝傫濰偔丅儌僠儀乕僔儑儞媫崀壓丅婥偵偟側偄傛偆偵搘椡偟偰偄偨偲偙傠偵儈僒僀儖傪懪偪崬傑傟偨丅偁乕偁丅偱偒傟偽儖乕儖傪夵惓偟偰梸偟偄丅懌偑彫偝偔偰傕廫暘丄曕峴丄峌寕丄婲偒忋偑傝偼偱偒傞偑埨掕惈傪峫偊傞偲懌棤傪戝偒偔偡傞偙偲偑堦斣娙扨偱妋幚偱偁傞丅奿摤媄戝夛偱偁傞埲忋丄儖乕儖偱嫋偝傟傞忦審傪僼儖偵妶梡偟側偄尷傝嫮偄儘儃僢僩偼嶌傟側偄丅偱傕側乕丏丏丏丂偐偭偙埆偄丅
丂屄恖揑偵偼懌偺棤偺戝偒偝傪掕媊偡傞傛傝丄奒抜搊傝側偳昁慠揑偵懌偺戝偒偝傪峫椂偟側偗傟偽偱偒側偄婯掕墘媄傪捛壛偡傞傎偆偑偄偄傛偆側婥偑偡傞丅崱偺奒抜偼墱峴偒偑嫹偔丄抜嵎偑戝偒偄偺偱擄堈搙偑崅偄偑丄婯掕墘媄梡偼偨偲偊偽墱峴偒侾俁侽倣倣崅偝侾侽倣倣偺擄堈搙偼掅偄偑懌棤偺戝偒偝傪昁慠揑偵惂尷偡傞僒僀僘偑傛偄偺偱偼側偄偩傠偆偐丅
丂傕偪傠傫儀僗僩側曽朄偱偼側偄偐傕偟傟側偄偑丄傂偲偮偺曽朄偱偼偁傞偲巚偆丅
|
| 俀侽侽俁擭俁寧係擔乮壩乯 |
仭梊掕
丂崱擔偼桳媼媥壣傪巊偭偰屵慜拞偼偍栶強丄屵屻偼懅巕偺妛峑丄栭偼晲憼岺戝偵峴偔梊掕偱偁傞丅懌棤偺峫偊曽傪侾俉侽搙曄偊偰傒偨丅寢壥偼偳偆側傞偐敾傜側偄偑丄愴偄側偑傜曽岦惈傪峫偊偰傒偨偄偲巚偆丅
仭楙廗帋崌
丂幚愴宱尡偼壠偱偄傠偄傠偲峫偊傞傛傝壗攞傕岠壥揑丅壽戣偑晜偒弌偰偔傞丅崱夞晜偒弌偰偒偨栤戣揰偼俀偮丅傂偲偮偼婡摦椡丄傕偆傂偲偮偼峌寕椡丅
丂婡摦椡偼椡傪擖傟偰夵椙偟偰偒偨偮傕傝偩偑丄偐傢偝偒儘儃僢僩偲斾傋傞偲僆儕儞僺僢僋慖庤偲愒傫朧偖傜偄偺嵎偑偁傞丅恀寱偵摦曕峴傪専摙偡傞昁梫偑偁傝偦偆偩丅
丂峌寕椡偼壽戣偑懡偄丅昁嶦媄偼崌奿揰偩偭偨偑丄僷儞僠椡偼憡曄傢傜偢尒偣偐偗偩偗偱偁傞丅俵俥偺僷儞僠椡偑側偄偺偼丄崢偵幉偑柍偄偺偑嵟戝偺尨場丅俵俥偑婃忎側偺偼崢偵幉偑側偄偺偑嵟戝偺棟桼丅憡斀偡偙偺帠幚傪偳偆夝寛偟偰偄偔偐丄崱屻偺壽戣偱偁傞丅
丂僞僀僾俢偺懌棤偼岠壥揑偩偭偨丅戝偒偝偺岠壥傕偁傞偑丄偦傟埲忋偵乽峫偊曽偺曄峏乿偑岠壥揑偩偭偨丅侾俇擔偺堎庬奿摤媄乮偐傢偝偒儘儃僢僩偺晹撪愴乯偱偦偺岠壥傪嵞妋擣偡傞丅埲慜丄晹撪愴偼偐傢偝偒儘儃僢僩巇條偺懌棤偱挧愴偡傞偲傎偺傔偐偟偨偑丄崱擔偺楙廗帋崌偱婥帩偪偑曄傢偭偨丅姰慡俼俷俛俷亅俷俶俤巇條偱挧愴偡傞丅
|
| 俀侽侽俁擭俁寧俆擔乮悓乯 |
仭俁俈侽侽侽侽
丂乽俁俈枩恖栚偼巹乿丂柡偐傜偺帺屓怽崘丅偆乕乕傫丅
|
| 俀侽侽俁擭俁寧俉擔乮搚乯 |
仭曕峴懍搙
丂曕峴懍搙傪幚應偡傞偲堦曕俁們倣偱栺俁昩偐偐傞丅偡側傢偪昩懍侾們倣丅婽傛傝抶偄丅俵俥偺恎挿偼戝恖偺係暘偺侾丅偣傔偰恖偲曕偔懍搙偺侾俇暘偺侾傪栚巜偟偨偄丅恖偺曕偔懍搙傪帪懍係倠倣偟偰偦偺侾俇暘侾偼昩懍俈們倣丄崱偺俈攞偺懍搙傪栚昗偲偟傛偆丅
仭恎挿偲曕偔懍搙偼帺忔偺斀斾椺偐丠
丂抦傜傫丅恎挿偺媡悢偩偲昩懍俀俉們倣丅栚昗偑崅偡偓傞丅偦偙偱乽曕峴懍搙偼恎挿偺帺忔偵斀斾椺乿偲彑庤偵掕媊丅庯枴偺悽奅丄婥妝偵偄偔偙偲偵偡傞丅
仭懌棤
丂懌棤丅擺摼偑偄偐側偄丅僗僩儗僗偑偨傑傞丅乽堦搙桪彑偟偨傫偩偐傜彑偮偙偲傪栚昗偵偟側偔偰傕偄偄偺偱偼側偄偐乿乽嫞媄夛偱偁傞埲忋彑偮偙偲傪栚昗偵偟側偗傟偽堄枴偑側偄偺偱偼側偄偐乿弔堦斣偵怱偑梙傟摦偔丅
仭側傫偰偙偲偼側偄
丂乽帺暘偑擺摼偺偄偔懌棤偱彑偰傞儘儃僢僩傪嶌傟偽偄偄偺偩乿丂悂偭愗傟偨丅
仭昩懍俀丏俆們倣
丂偪傚偭偲偁傇側偭偐偟偄偑昩懍俀丏俆們倣傑偱夵慞偟偨丅僷儔儊乕僞偺廋惓偩偗偱偼尷奅偑尒偊偰偒偨偺偱庤朄傪偐偊傛偆丅偦傠偦傠傑偠傔偵寁嶼偡傞偐乕 |
| 俀侽侽俁擭俁寧侾俆擔乮搚乯 |
仭偄傛偄傛
丂偄傛偄傛丄柧擔偼偐傢偝偒儘儃僢僩偺晹撪愴偵偍幾杺偡傞丅挬偐傜懳偐傢偝偒儘儃僢僩梡偺峌寕媄偺楙廗傪峴偭偰偄偨偑僒乕儃儂乕儞傪俀枃妱偭偰偟傑偭偨丅僒乕儃偼堎忢側偟丅僒乕儃儂乕儞偑偆傑偄嬶崌偵僩儖僋儕儈僢僞偵側偭偰偄傞傛偆偩丅梊旛偼偁偲係枃丅帋崌慜偼偄偮傕偙傫側挷巕偩丅
|