![]()
マウスを作るのに、いったいどのくらいの時間が必要なのだろうか。
「今日も私よりマウスを選んだわね」
家族批判にもめげず驀進する我がマウス 人生
世界一になるまでの日々を真実のままに記録してみることにした。
2002年 3月

 |
2002年3月3日(日) ■BasicMouse 花粉症が悪化するなか、土、日をマウス作りに挑戦したが、いつものパワーはなく完成することはできなかった。半田のヤニが、敏感になった鼻の粘膜を刺激。半田付けができない。なんとかCPU基板までの半田付けは完了したが、センサ基板、モータドライブ基板は手付かず。残念。 半田付けができないならソフトを書くしかない。完成したCPUボードにはスイッチが3個、LCDが1個搭載されている。スイッチによるモードセレクトとLCD制御モジュールを作成。オープニングタイトルが表示できるようになったところで作業中止する。ソフトを書いている間は鼻は大丈夫なのだが、こんどは目がつらい。涙目に文字がぼやける。 ■反省 このごろ、宣言したことが守れていない。おおいに反省。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
2002年3月10日(日) ■花粉症 花粉症、更に悪化。最悪である。息ができない、ビールが飲めない。 ■BasicMouse 初心者講座用マウスがついに完成。 さあ、次はソフトだ。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
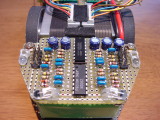 センサユニット  NEWモータドライブユニット 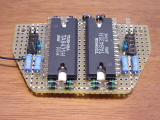 OLDモータドライブユニット |
2002年3月17日(日) ■センサーユニット BasicMouseのセンサユニット。基本的にはロボコンマガジンで連載したのと同じ回路。変更点はオペアンプを2個入りから4個入りに置き換え、ドライブトランジスタをトランジスタアレーに置き換えた。表面実装部品なしで基板に実装することが可能となった。 ■モータドライブユニット BasicMouseのモータドライブユニット。先週作ったものは、性能上の問題で没。SLA7033M+TA8415Pの構成に変更した。ご存知のとおりSLA7033Mはインチピッチではないためユニバーサル基板には実装しにくい。これを嫌って先週までは東芝のドライバを使うこと考えていたのだが、性能を優先することにした。ロボコンマガジンの記事と同じように足を2mmぐらいに切り線材を一本一本半田付けする方法で実装する。 ■花粉症 相変わらずである。写真のとおりモータドライブユニットも半分だけ配線したところで止まっている。桜が咲き始めたということは杉の花粉がなくなるということだ。うれしい。 ■砂楽砂 砂風呂に初挑戦。2時間かけて昭島まで行き、砂風呂初体験。日常と違う体験は体だけでなく心もリフレッシュされる。なかなかよかった。風呂に入っている間は天国だったが、帰りの2時間は地獄だった。昭島の花粉濃度は異常だ。 ■火曜日 今週の火曜日は川崎産業振興会館へ行く予定。 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 2002年3月19日(火) ■2足歩行 ソニーが新型の2足歩行ロボットを発表した。ちなみに旧型はこのスペックであった。自由度とセンサが大幅に強化されている。特に注目は自由度が24から38に変更。両足に2軸の加速度センサ追加されいる点である。より人間の動作に近づいたようである。 温度センサ6個、マイクロホン7個… なるほど…
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
2002年3月21日(木) ■BasicMouse 基本走行モジュールを作り性能を確認。一部問題があったため、ハードウエアの改良を行った。ハード的には満足した。いよいよ本格的にソフトを組み込む。手始めにMIKE2001SPのソフトをベースに組み込んでみるつもりだ。今日明日が勝負。日曜日の東日本支部定例でお披露目することを目標に行動する。 ■東日本支部例会 今週の日曜日(3月24日) 13:30から芝浦工大で東日本支部例会が行われる。昨年配布されたプリント基板マウスについて上光さんが解説されるそうだ。楽しみだ。 |
||

 写真提供:ダンボロット研究所 |
2002年3月22日(金) ■BoxMaster & ダンボロット研究所 ロボットマニア必見。百聞は一見にしかず。BoxMasterとダンボロット研究所をアクセスしてみてください。すばらしい完成度です。ここではダンボール1箱から特注で作ってくれるようです。何かと重宝しそうですね。世の中にはすごい人がたくさんいるんですね。 |
||
| 2002年3月23日(土) ■BasicMouse1 朝からマウス三昧。BasicMouseの16区間直線走行を繰り返す。最高速度1.5m/sec 加速度1.4m/sec^2 支部サーキット16秒台を目指す。 ■BasicMouse2 まだ、直線姿勢制御が気に入らないが、調整はあとで行うことにする。 さあ次はスラローム旋回だ。スラローム進入速度0.5m/secを目指す。動き始めると面白くてたまらない。今日の花見は中止だ(雨ふっているし)。 |
|||
| 2002年3月24日(日) ■BasicMouse 結局、スラローム旋回はできなかった。楽しようと思い、MIKE2001SPのソフトを移植しようしたのが敗因だった。SH2で楽して作ったソフトをそのまま移植できるはずもなかった。CPUパワーが足りない。もちろん、ちゃんと作れば3664で十分のはずである。 ■MIKE2001SP 支部例会にMIKE2001SP持っていこうと思い、久しぶりに動かす。相変わらずほこりに弱いが、迷路をきれいにすると、抜群である。今日は雑巾も持っていこう。 |
|||
 |
2002年3月28日(木) ■ちーボット 「ちーボット」を入手。平日は送別会続きで製作時間が確保できない。週末の楽しみにとっておこう。 ■BasiMouse 作り始めるときりがない。性能向上より講座を進めるほうが重要だと気づく。「昇圧回路」も「新センサ回路」「モータの変更」もお預け。現状でBasicMouseVer1.0のハードをFIXすることにする。 |
||
 |
2002年3月30日(土) ■ちーボット 今日は朝から 「ちーボット」を製作。製作時間2時間。製作記事1時間。 さあ、次は何をやろう… |
||
 |
2002年3月31日(日) ■初心者講座 今日は朝から初心者講座用のページを更新している。絵が多いので時間がかかる。午後は買い物の予定。 |
||