| ‚Q‚O‚O‚R”N‚P‚PŒژ‚P“ْپi“y—j“ْپj |
پ،ٹآ‹«ˆع“®
پ@ƒzپ[ƒ€ƒyپ[ƒWچىگ¬‚جٹآ‹«‚ً‰َ‚ꂽƒmپ[ƒgƒpƒ\ƒRƒ“‚©‚çƒfƒXƒNƒgƒbƒv‚ضˆع“®پB‚و‚¤‚â‚‚ـ‚ئ‚à‚ةچXگV‚إ‚«‚é‚و‚¤‚ة‚ب‚ء‚½پB
پ،ƒeƒNƒjƒJƒ‹ƒJƒ“ƒtƒ@ƒŒƒ“ƒX
پ@–³ژ–ڈI—¹پHچ،‰ٌ‚ح‚µ‚ل‚ׂè–Y‚ê‚ب‚¢‚و‚¤‚ةپAڈ‰‚ك‚ؤŒ´چe‚ً—pˆس‚µ‚ؤƒZƒbƒVƒ‡ƒ“‚ة‚ج‚¼‚ٌ‚¾پBŒ‹‰ت‚ح‘هژ¸”sپBƒپƒچƒپƒچ‚ة‚ب‚ء‚ؤ‚µ‚ـ‚ء‚½پB‚â‚è‚ب‚ê‚ب‚¢‚±‚ئ‚ح‚·‚é‚à‚ٌ‚¶‚ل‚ب‚¢پBˆê“xƒyپ[ƒX‚ً—گ‚·‚ئپA‚ا‚¤‚µ‚و‚¤‚à‚ب‚¢پBŒ´چe‚ًŒ©‚é‚ج‚ً‚â‚ك‚ؤ“à—e‚جچ\گ¬‚ً—§‚ؤ’¼‚·‚ج‚ة‚P‚O•ھ‹ك‚‚©‚©‚ء‚ؤ‚µ‚ـ‚ء‚½پBژ€‚ت‚©‚ئژv‚ء‚½پB‚سپ[پ[پ[پB
پ@ژ¸”s‚ج——R‚حŒ´چe‚جژڑ‚ھڈ¬‚³‚·‚¬‚½پB”–ˆأ‚¢ڈَ‘ش‚¶‚ل“ا‚ك‚é‚ي‚¯‚ب‚¢پBŒoŒ±•s‘«پB‚à‚¤‚Q“x‚ئŒ´چe“ا‚ف‚ح‚â‚ç‚ب‚¢پB‚½‚ش‚ٌپEپEپE
پ@Œم”¼‚ح‚و‚¤‚â‚ژ©•ھ‚جƒyپ[ƒXپB‚ـ‚½—]Œv‚ب‚±‚ئ‚ـ‚إ‚µ‚ل‚ׂء‚½‚©‚à‚µ‚ê‚ب‚¢پEپEپE
|
| ‚Q‚O‚O‚R”N‚P‚PŒژ‚P‚O“ْپiŒژ—j“ْپj |
پ،—DڈںپHپHپH
پ@‚±‚ج‰÷‚µ‚³‚ًƒoƒl‚ةپA—ˆ”N‚حژ©•ھ‚ج—ح‚إڈں—ک‚ًژè‚ة‚µ‚½‚¢پDپDپD
پ،ڈـ•i
پ@—Dڈںڈـ•i‚ح‚¨•ؤ‚P‚OKgپAƒ‰ƒtƒ‰ƒ“ƒX‚TKgپAڈ¤•iŒ”پAƒgƒچƒtƒBپ[پB‚³‚·‚ھ‚ةچ،‰ٌ‚حژ‚ء‚ؤ‹A‚éژ–‚ً’f”OپB‘î‹}•ض‚ًژg‚¢‚ـ‚µ‚½پB
پ،ˆن“،ƒ}ƒEƒX
پ@‚ ‚é’ِ“x‚ح‘z‘œ‚µ‚ؤ‚¢‚½‚ھپA‘z‘œˆبڈم‚ة‚·‚²‚¢ƒ}ƒEƒX‚ةگ¬’·‚µ‚ؤ‚¢‚½پB‚·‚خ‚炵‚¢پB—ًژj‚ً“h‚è‘ض‚¦‚邱‚ئ‚حٹشˆل‚¢‚ب‚µپB‚س‚ئژ©•ھ‚جƒ}ƒEƒX‚ح‚T”Nٹشگi•à‚µ‚ؤ‚¢‚ب‚¢‚±‚ئ‚ة‹C•t‚پB‚¢‚©‚ٌپA‚±‚ج‚ـ‚ـ‚¶‚ل‚¢‚©‚ٌپB
پ،ƒپƒ^ƒٹƒbƒNƒtƒ@ƒCƒ^پ[‚ھ‚â‚ء‚ؤ‚‚é
پ@‚±‚؟‚ç‚ج‚ظ‚¤‚حڈ‡’²‚إ‚µ‚½پB“ھ‚ھٹغ‚¢‚ج‚إ–³—‚©‚ئژv‚ء‚ؤ‚¢‚½‚R“_“|—§‚à‚إ‚«‚é‚و‚¤‚ة‚ب‚è‚ـ‚µ‚½پB‚و‚©‚ء‚½پA‚و‚©‚ء‚½پB |
 |
|
| ‚Q‚O‚O‚R”N‚P‚PŒژ‚Q‚R“ْپi“ْ—j“ْپj |
پ،‚Wˆت
پ@‚Rƒ–Œژ‚ة‚ي‚½‚é’·‚’Z‚¢گي‚¢‚ھڈI—¹‚µ‚½پB‚WŒژ‚ج‚q‚ڈ‚‚‚ڈ‚n‚ژ‚…ˆب—ˆƒ}ƒEƒX‚ةگê”OپB“r’†‚إƒJƒ“ƒtƒ@ƒŒƒ“ƒX‚ةژٹش‚ً‚ئ‚ç‚ê‚邱‚ئ‚à‚ ‚ء‚½‚ھپA‚Rƒ–Œژٹش‚ة‚S‚آ‚ج’n‹و‘ه‰ï‚ةژQ‰ءپBƒ}ƒEƒX‚ًڈnگ¬‚µ‚ؤ‚¢‚ء‚½پB‚R‘نچى‚é‚ئŒِŒ¾‚µ‚ؤ‚¢‚½‚ھپAچإڈI“I‚ة‚ح‚Q‘ن‚ةچiچ‚ف‘ه‰ï‚ة—ص‚ٌ‚¾پBŒ‹‰ت‚ح‚WˆتپB“ْ–{گl‚ئ‚µ‚ؤ‚حˆن’J‚³‚ٌ‚ة‚آ‚¢‚إ‚Qˆت‚إ‚ ‚ء‚½پB—Dڈں‚حچً”N‚Qˆت‚ةٹأ‚ٌ‚¶‚½ƒVƒ“ƒKƒ|پ[ƒ‹پBچإŒم‚ـ‚إژè‚ةٹ¾ˆ¬‚é“WٹJ‚ًگ§‚µ—Dڈں‚ً‚à‚¬‚ئ‚ء‚½پB
پ@”ق‚جٹى‚شژp‚ة—ˆ”N‚جژ©•ھ‚ًƒ_ƒu‚点‚ب‚ھ‚ç–‹‚ً‰؛‚낵‚½پB |
 |
 |
 |
پ،‚a‚پ‚“‚‰‚ƒ‚l‚ڈ‚•‚“‚…
پ@چ،”N‚à‘½‚‚ج•û‚ھ‚a‚پ‚“‚‰‚ƒ‚l‚ڈ‚•‚“‚…‚ًچى‚èپA‘ه‰ï‚ةژQ‰ء‚µ‚ؤ‚¢‚ـ‚µ‚½پB‚¤‚ꂵ‚¢Œہ‚è‚إ‚·پBƒ}ƒCƒNƒچƒ}ƒEƒX‚ج–ت”’‚³پAٹ´‚¶‚ؤ‚¢‚½‚¾‚¯‚ـ‚µ‚½پHژں‚ة‚â‚é‚ׂ«‚±‚ئ‚حٹeƒ†ƒjƒbƒg‚ج‰ü—ا‚إ‚·پB
پ@‚a‚پ‚“‚ƒ‚l‚ڈ‚•‚“‚…‚ئ‚l‚‰‚ƒ‚’‚ڈ‚e‚‰‚‡‚ˆ‚”‚…‚’‚جˆل‚¢‚ح‚ا‚±‚¾‚ئژv‚¢‚ـ‚·‚©پH‚»‚ê‚ًچl‚¦‚ê‚خژ©‚¸‚ئژں‚جƒXƒeƒbƒv‚ھŒ©‚¦‚ؤ‚‚é‚ئژv‚¢‚ـ‚·پBƒ}ƒCƒNƒچƒ}ƒEƒX‚ح‰œ‚ھگ[‚¢‚إ‚·پBŒp‘±‚±‚»—ح‚ب‚èپBپ@‚ـ‚½—ˆ”NپAƒXƒeƒbƒvƒAƒbƒv‚µ‚½ƒ}ƒEƒX‚ة‚¨–ع‚ة‚©‚©‚ê‚邱‚ئ‚ًٹْ‘ز‚µ‚ؤ‚¢‚ـ‚·پB
پ،‚a‚پ‚“‚‰‚ƒ‚l‚ڈ‚•‚“‚…‚ج‰ü—ا
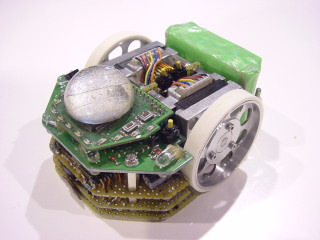
پ@‚a‚پ‚“‚‰‚ƒ‚l‚ڈ‚•‚“‚…‚ئ‚l‚‰‚ƒ‚’‚ڈ‚e‚‰‚‡‚ˆ‚”‚…‚’‚جچ\گ¬‚ح“¯‚¶‚إ‚·پBƒnپ[ƒh‚ح‚b‚o‚tپA“dŒ¹پAƒ‚پ[ƒ^پAƒZƒ“ƒTپBƒ\ƒtƒg‚حژpگ¨گ§ŒنپA–ہکH‰ًگحپAگي—ھ‚ئ‚¢‚¤‚V‚آ‚جƒ†ƒjƒbƒg‚إچ\گ¬‚³‚ê‚ؤ‚¢‚ـ‚·پB‚a‚پ‚“‚‰‚ƒ‚l‚ڈ‚•‚“‚…‚ً—‰ً‚µ‚½‚ب‚çپAژں‚ة‚â‚邱‚ئ‚حٹeƒ†ƒjƒbƒg‚جƒXƒeƒbƒvƒAƒbƒv‚إ‚·پB
پ@—ل‚¦‚خپA“dŒ¹پB‚a‚پ‚“‚‰‚ƒ‚l‚ڈ‚•‚“‚…‚إ‚حƒfƒoƒbƒO‚µ‚â‚·‚¢‚و‚¤‚ة’·ژٹش‘–چs‚ھ‚إ‚«‚邱‚ئ‚ًڈdژ‹‚µ‚ؤگفŒv‚³‚ê‚ؤ‚¢‚ـ‚·پB‚»‚ج‚½‚كپA’PژOƒjƒbƒPƒ‹گ…‘f“d’r‚ً12–{“‹چع‚µ‚ؤ‚¢‚ـ‚·پB‚±‚ج“d’rƒ†ƒjƒbƒg‚ھ‚a‚پ‚“‚‰‚ƒ‚l‚ڈ‚•‚“‚…‚جچإ‘ه‚جژم“_‚إ‚·پBڈd‚½‚¢پDپDپD‚±‚ê‚ً’PژlƒjƒbƒPƒ‹گ…‘f‚â“d’rپ{ڈ¸ˆ³‰ٌکH‚ة’u‚«ٹ·‚¦‚ê‚خپA‚a‚پ‚“‚‰‚ƒ‚l‚ڈ‚•‚“‚…‚ج‰^“®گ«”\‚حŒ€“I‚ة‰ü‘P‚³‚ê‚ـ‚·پB
پ@‰ü—ا‚جƒRƒc‚حژ©•ھ‚جˆê”ش“¾ˆس‚ب•ھ–ى‚©‚çچU‚ك‚邱‚ئ‚إ‚·پB‚»‚µ‚ؤ“¯ژ‚ة‚Q‚آ‚ً‚â‚ç‚ب‚¢‚±‚ئ‚إ‚·پB–ب’J‚³‚ٌ‚ج‰ü—اŒ^‚a‚پ‚“‚‰‚ƒ‚l‚ڈ‚•‚“‚…‚ًژQچl‚ة‚µ‚ؤƒXƒeƒbƒvƒAƒbƒv‚µ‚ـ‚µ‚ه‚¤پB |
 |
 |
|
| ‚Q‚O‚O‚R”N‚P‚PŒژ‚Q‚S“ْپiŒژ—j“ْپj |
پ،ژ‚ج‰ك‚¬چs‚‚ـ‚ـ‚ة
پ@ڈں‚ء‚ؤ‚à•‰‚¯‚ؤ‚àپA–¢—ˆ‚ح•K‚¸‚â‚ء‚ؤ‚‚éپBژٹش‚¾‚¯‚ح’N‚ة‚إ‚à•½“™پB‰F’ˆ‚©‚ç—^‚¦‚ç‚ꂽژٹش‚ً‚ا‚¤ژg‚¤‚©‚حŒآگl‚جژ©—RپB‰ن‚ھƒچƒ{ƒbƒgگlگ¶ƒGƒ“ƒWƒ“‘SٹJپB
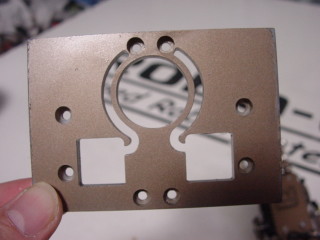
پ،••ˆَ‰ًڈœ
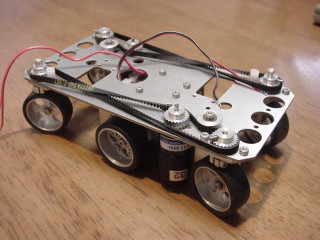
پ@ژdچ‚ف‚¾‚¯‚ح‚±‚آ‚±‚آپB••ˆَ‚µ‚ؤ‚¢‚½ƒAƒ‹ƒ~”آ‚T‚‹‚‡‚ج•R‚ً‰ً‚پB‚±‚جƒLƒƒƒ“ƒpƒX‚ة‚ا‚ٌ‚ب–²‚ً•`‚±‚¤پBMetallicFighterژn“®پB
پ،‘ه‰ïƒXƒPƒWƒ…پ[ƒ‹
پ@‚»‚¤‚ب‚ٌ‚¾پDپDپDپB‘ه‰ïƒXƒPƒWƒ…پ[ƒ‹‚ًٹm”FپB—\‘I‚ح‚PŒژ‚R‚P“ْپBŒˆڈں‚ح‚QŒژ‚P“ْپB‚¨‚ءپIپAٹK’iڈ¸چ~‚ب‚ا‚جƒTƒu‹£‹Z‚ح•ت“ْ’ِ‚ج‚QŒژ‚Q‚X“ْپB’m‚ç‚ب‚©‚ء‚½پDپDپD
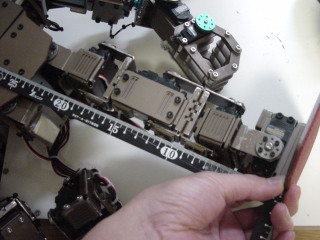
پ،‘«—
پ@MetallicFighter‚ج‘«‚ج’·‚³‚ً‘ھ’è‚Q‚S‚T‚چ‚چپB
RoboOne‚ج‹£‹Z‹K‘¥‚ة‚و‚é‚ئپA
(a) ‘«— (’n–ت‚ةگع’n‚·‚é•”•ھ) ‚جچإ‘ه’·‚³‚ح‹r‚ج’·‚³‚ج70%ˆب‰؛‚ئ‚·‚éپB‹r‚ئ‚ح‹r‚ھƒچƒ{ƒbƒg‚ج“·‘ج‚©‚ç—£‚ê‚ؤ‘OŒمچ¶‰E‚ة“®‚ژ²‚ج’n–ت‚و‚è‚جچ‚‚³‚ئ‚·‚éپB
‚½‚¾‚µپA‘«— ‚جچإ‘ه’·‚³‚ح20ƒZƒ“ƒ`ƒپپ[ƒgƒ‹ˆب‰؛‚ئ‚·‚éپB
‚ئ‚¢‚¤‚±‚ئ‚حپAŒ»ڈَ‚ج‘«‚ة•t‚¯‚ç‚ê‚é‘«— ‚جچإ‘ه’·‚ح‚Q‚S‚T‚ک‚OپD‚Vپپ‚P‚V‚P‚چ‚چپB‘O‘ه‰ï‚جژ‚ج‘«— ‚جچإ‘ه’·‚ح‚P‚S‚O‚چ‚چپB‚ب‚ٌ‚¾پA‚ـ‚¾‘ه‚«‚‚إ‚«‚é‚ٌ‚¶‚ل‚ٌپBڈں‚؟‚ة‚±‚¾‚ي‚é‚©پAƒXƒ^ƒCƒ‹‚ً—Dگو‚·‚é‚©پA‚¶‚ء‚‚èچl‚¦‚و‚¤پB
پ،ƒAƒ‹ƒ~‰ءچH‚ة’§گي
پ@‚`‚a‚r‚¾‚¯‚¶‚لŒہٹE‚ھ‚ ‚éپB‚l‚n‚c‚d‚k‚`‚إƒAƒ‹ƒ~‰ءچH‚ة’§گيپB
پ@Œ‹‰ت‚ح‚²——‚ج‚ئ‚¨‚èپBژ„‚ة‚حڈ\•ھ‚ب‰ءچHگ¸“x‚إ‚ ‚éپB‚±‚ê‚إژ©چى”حˆح‚ھ‚®‚ء‚ئچL‚ھ‚ء‚½پB’¼گüڈdژ‹‚جگفŒv‚©‚çپAژ©—R‹بگü‚ًژg—p‚µ‚½”CˆسŒ`ڈَ‚ج•”•i‚ًچى‚ê‚éپB(^o^);
پ@ |
 |
 |
 |
 |
 |
|
| ‚Q‚O‚O‚R”N‚P‚PŒژ‚Q‚T“ْپi‰خ—j“ْپj |
پ،‹C‚ة‚ب‚é
پ@ƒ}ƒCƒNƒچƒ}ƒEƒX‘ه‰ï‚ج‘إ‚؟ڈم‚°‚إˆن’J‚³‚ٌ‚ھ‚¨‚µ‚ل‚ء‚ؤ‚¢‚½‚±‚ئ‚ھ‹C‚ة‚ب‚éپBچl‚¦‚é‚و‚èژژ‚µ‚ؤ‚ف‚و‚¤پB‚c‚b‚Q—ض—p‚جƒsƒjƒIƒ“‚ًƒ‚پ[ƒ^پ[‚©‚ç‚ح‚¸‚µپAƒ}ƒjƒ…ƒAƒ‹‚ًڈn“ا‚·‚éپB |
| ‚Q‚O‚O‚R”N‚P‚PŒژ‚Q‚U“ْپiگ…—j“ْپj |
پ،‹Lک^ڈCگ³پ@8ˆت
پ@‘ه‰ï‹Lک^‚ح7ˆت‚ئŒfچع‚µ‚½‚ھپAژہچغ‚ح8ˆت‚إ‚ ‚ء‚½پBڈمˆت‚ة“üڈـ‚µ‚½2‘نƒVƒ“ƒKƒ|پ[ƒ‹ƒ}ƒEƒX‚ج—قژ—گ«‚ھچ‚‚©‚ء‚½‚½‚ك‘ه‰ï‹K‘¥‚ة‚و‚è‚ا‚؟‚ç‚©‚جƒ}ƒEƒX‚ھ‹Lک^‘خڈغٹO‚ئ‚ب‚ء‚½‚ج‚إŒJڈم‚°ڈ‡ˆت‚ئ‚ب‚ء‚ؤ‚¢‚½پB
پ@–{—ˆ‚ح—\‘I‚ج’iٹK‚إ—قژ—گ«‚جچ‚‚¢ƒ}ƒEƒX‚حگU‚é‚¢‚ة‚©‚¯‚ç‚ê‚é‚ھپA‰“•û‚©‚ç—ˆ‚½‚ئ‚¢‚¤ژ–‚إ“ء—ل‘[’u‚ئ‚ب‚ء‚½پBژ„‚ً‚ح‚¶‚ك‘½‚‚ج•û‚ھ—\‘I‚إ‚ح2‘نڈo‚µ‚ؤ‚¢‚é‚ھ1‘ن‚µ‚©Œˆڈں‚ةڈo‚ê‚ب‚¢‚ج‚ح‚±‚ج‘ه‰ï‹K‘¥‚½‚ك‚إ‚ ‚éپB“ء—ل‚ةٹض‚µ‚ؤ‚حژ„‚ح—ا‚©‚ء‚½‚ئژv‚¤پB
پ@‚½‚¾پA—\‘I‚جژپA4”ش–ع‚ةڈo‘–‚µ‚½ٹطچ‘ƒ}ƒEƒX‚حƒXƒ^پ[ƒg’n“_ˆبٹO‚إ’²گ®‚µ‚ب‚¢‚ئ‘–‚ê‚ب‚©‚ء‚½‚و‚¤‚إپAƒٹƒ^ƒCƒA‚µ‚½پB‰“•û‚©‚ç—ˆ‚½‚ئ‚¢‚¤——R‚ھگ¬‚è—§‚آ‚ج‚إ‚ ‚ê‚خپA‚¹‚ك‚ؤژQچl‹Lک^‚ًژc‚¹‚é‚و‚¤‚ب‘[’u‚ً‚ئ‚ء‚ؤ‚à‚و‚©‚ء‚½‚ج‚إ‚ب‚¢‚©‚ئژv‚¤پB
پ@ƒ}ƒEƒX‹£‹Z‚ج—ا‚¢‚ئ‚±‚ë‚حŒِ•½Œِگ³‚إ‚ ‚é‚ئ‚±‚ëپB1000•ھ‚ج1•b‚إ‚à‘¬‚©‚ء‚½ƒ}ƒEƒX‚ھڈں‚آگ¢ٹEپBچ،Œم‚àŒِ•½Œِگ³‚ب‰^—p‚ًٹْ‘ز‚µ‚½‚¢پB
پ@“ء—ل‘[’u‚ئ‚ح‚¢‚¦‹Lک^‚ح‹Lک^پBژ„‚جچ،”N‚ج‹Lک^‚ح8ˆت‚ئ‚¢‚¤‚±‚ئ‚ة‚·‚éپB
پ،‹C‚ة‚ب‚é
ˆن’JژپH‚پu‚U—ضƒ}ƒEƒX‚حƒ\ƒtƒgژں‘و‚إ‚à‚ء‚ئ‘¬‚‚ب‚éپv
–{“–‚إ‚ ‚낤‚©پDپDپD
é}گi‚·‚é‰ن‚ھƒ}ƒEƒXگlگ¶پBژژ‚³‚¸‚ة‚ح‚¢‚ç‚ê‚ب‚¢پB
ƒ\ƒtƒg‚ًڈ‘‚¢‚ؤ‚ف‚½‚‚ب‚ء‚ؤ‚«‚½پB’p‚ً‚©‚‚¾‚¯‚©‚à‚µ‚ê‚ب‚¢‚ھپDپDپD
|
|
|
| ‚Q‚O‚O‚R”N‚P‚PŒژ‚Q‚V“ْپi–ط—j“ْپj |
پ،‰¼‘g‚ف
پ@ƒپƒJ•”•i‚ً‰¼‘g‚ف‚µ‚ؤ‚ف‚½پB‚ـ‚¾ƒAƒ‰ƒCƒپƒ“ƒg‚ھٹأ‚¢‚炵‚پA‘ه‰ï‚جژ‚³‚ي‚点‚ؤ‚à‚ç‚ء‚½ٹ´گG‚ة’ِ‰“‚¢پB‚؟‚ه‚ء‚ئ”Y‚ٌ‚إ‚¢‚éپB
پ،–²–c‚ç‚ق
پ@چ\‘¢‚ًƒ`ƒFƒbƒN‚µ‚ب‚ھ‚çپA‚ن‚ء‚‚è‘g‚ف—§‚ؤ‚ؤ‚¢‚é‚ھپAگڈڈٹ‚جچH•v‚ة‚¤‚ب‚é‚خ‚©‚èپDپDپDپ@‚»‚ê‚ئ“¯ژ‚ة‚l‚n‚c‚d‚k‚`‚ج‰e‚ھ‚؟‚ç‚آ‚پBگو“ْ‚l‚n‚c‚d‚k‚`‚إƒAƒ‹ƒ~‰ءچH‚جٹ´گG‚ً–،‚ي‚ء‚½‚±‚ئ‚ھ‘ه‚«‚¢پBƒIƒٹƒWƒiƒ‹‚U—ضƒ}ƒEƒX‚à–²‚إ‚ح‚ب‚¢پB‚ـ‚¸‚ح‹ZڈpڈK“¾پBژ„‚ة‚ئ‚ء‚ؤ‚ج‚a‚پ‚“‚‰‚ƒ‚l‚ڈ‚•‚“‚…پB‚ح‚â‚éگS‚ً—}‚¦‚ب‚ھ‚çڈH‚ج–é’·‚ًٹy‚µ‚قپB |
 |
|
| ‚Q‚O‚O‚R”N‚P‚PŒژ‚Q‚W“ْپi‹à—j“ْپj |
پ،–¼‘O‚ً‚©‚¦‚؟‚ل ‚ ‚©‚ٌ
پ@چ،”N‚حMicroFighter‚جŒ|–¼‚ًژg‚ء‚½‚ھ–{–¼‚ح‚l‚h‚j‚dپBچ،Œم‚ح‚±‚ج–¼‘O‚ة“ˆê‚·‚éپB |
| MIKE2002SP2 (MicroFighter1) |
| Width |
84.5mm |
 |
| Length |
106mm |
| Hight |
55.5mm |
| Wheel:D |
51.8mm |
| Wheel:W |
6mm |
| Weight |
682g |
| Motor |
PK243-01A x 2 |
| Sensor |
Visible Photo Sensor x 4 |
| PowerSource |
NiMH 1.2V 750mAh x 11 |
| CPU |
SH2-7045 |
| MIKE2003SP(MicroFighter2) |
| Width |
84.4mm |
 |
| Length |
104mm |
| Hight |
64.5mm |
| Wheel:D |
51.6mm |
| Wheel:W |
8mm |
| Weight |
548g |
| Motor |
KH39EM-801 x 2 |
| Sensor |
Visible Photo Sensor x 4 |
| PowerSource |
NiMH 1.2V 750mAh x 11
+ StepUp DC-DC converter |
| CPU |
SH2-7045 |
|
|
| ‚Q‚O‚O‚R”N‚P‚PŒژ‚Q‚X“ْپi“y—j“ْپj |
| پ،‘و24‰ٌ‘S“ْ–{ƒ}ƒCƒNƒچƒ}ƒEƒX‘ه‰ï‚جŒ‹‰ت |
|
1‰ٌ–ع |
2‰ٌ–ع |
3‰ٌ–ع |
4‰ٌ–ع |
5‰ٌ–ع |
 |
Min3G |
1ˆت
8"391 |
‚c‚b‚Q—ض |
R |
35.264 |
9.251 |
R |
8.391 |
| Ng Beng Kiat |
| ƒVƒ“ƒKƒ|پ[ƒ‹ |
 |
ƒ}ƒCƒNƒچƒ}ƒEƒX‚R |
2ˆت
8"716 |
‚c‚b‚U—ض |
37.876 |
9.176 |
8.796 |
R |
8.716 |
| ˆن’J—D |
| “ْ–{ |
 |
BR3 |
3ˆت
9"631 |
‚c‚b‚Q—ض |
34.106 |
9.671 |
R |
R |
9.631 |
| Yin Hsiang Ting |
| ƒVƒ“ƒKƒ|پ[ƒ‹ |
 |
Killer33 |
4ˆت
9"704 |
‚c‚b‚Q—ض |
37.140 |
R |
9.704 |
9.775 |
9.757 |
| Lee SangMoon |
| ٹطچ‘ |
 |
HOPE Y |
5ˆت
10"070 |
‚c‚b‚Q—ض |
38.714 |
R |
R |
R |
10.070 |
| Zaw Khin |
| ƒVƒ“ƒKƒ|پ[ƒ‹ |
 |
COPYCAT |
6ˆت
10"599 |
‚c‚b‚Q—ض |
47.936 |
12.206 |
11.107 |
10.599 |
Time
Out |
| Kelvin Chau |
| ƒVƒ“ƒKƒ|پ[ƒ‹ |
 |
COOL 3 |
7ˆت
10"730 |
‚c‚b‚Q—ض |
38.335 |
R |
R |
10.730 |
R |
| Siew Peng Shorn |
| ƒVƒ“ƒKƒ|پ[ƒ‹ |
 |
MIKE2003SP
(MicroFighter2) |
8ˆت
11"075 |
ƒXƒeƒbƒpپ[
2—ض |
31.459 |
11.656 |
R |
11.075 |
R |
| گX‰i‰pˆêکY |
| “ْ–{ |
|
| ‚Q‚O‚O‚R”N‚P‚PŒژ‚R‚O“ْپi“ْ—j“ْپj |
پ،‚³‚ç‚خ‚l‚…‚”‚پ‚Œ‚Œ‚‰‚ƒ‚e‚‰‚‡‚ˆ‚”‚…‚’‚S
پ@‹t—§‚؟‚جŒِŒ¾‚ح‰ت‚½‚µ‚½‚à‚ج‚جپAŒˆڈںƒٹپ[ƒO‚إƒpƒ“ƒ`‚ً‚ذ‚ئ‚آ‚àŒJ‚èڈo‚·‚±‚ئ‚ب‚‘ه‘ع•”چœگـ‚إƒٹƒ^ƒCƒA‚µ‚½‚l‚…‚”‚پ‚Œ‚Œ‚‰‚ƒ‚e‚‰‚‡‚ˆ‚”‚…‚’‚SپB‚l‚…‚”‚پ‚Œ‚Œ‚‰‚ƒ‚e‚‰‚‡‚ˆ‚”‚…‚’‚T‚ةگi‰»‚³‚¹‚邱‚ئ‚ة‚µ‚½پB300–‡‹ك‚‚جژتگ^‚ًژB‚è•ھ‰ًٹJژnپB‘هŒنڈٹ‚Vگl‚ئ‹¤’ک‚·‚éپu‚Q‘«•àچsƒچƒ{ƒbƒgگ»چىƒKƒCƒhپv‚إ‚l‚…‚”‚پ‚Œ‚Œ‚‰‚ƒ‚e‚‰‚‡‚ˆ‚”‚…‚’‚S‚جڈعچׂًŒِٹJ‚·‚é—\’èپB
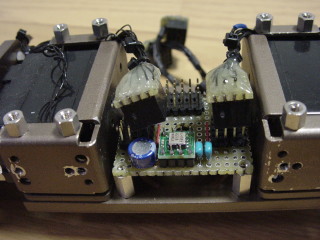
پ،‚؟‚ه‚ء‚ئگà–¾
پ@‰؛‚جژتگ^‚ح“·‘جژ²پB’†‰›‚جŒٹ‚ةچ¶‰؛‚جژتگ^‚ج‚`‚a‚r‚إ‹‰»‚µ‚½ƒTپ[ƒ{ƒzپ[ƒ“‚ھ‚ح‚ـ‚éپBژü‚è‚جچa‚ح”zگü—pپB‰؛‚ج‰؛‚جژتگ^‚ح‹¹‚ة‘g‚فچ‚ـ‚ꂽ‰ء‘¬“xƒZƒ“ƒTپ[پB |
 |
 |
 |
 |
 |
|
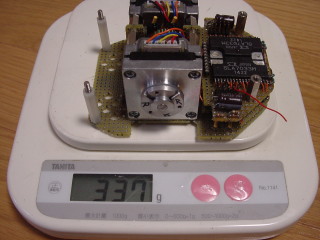
پ،ڈd—ت•ھگح
پ@ƒJƒ“ƒtƒ@ƒŒƒ“ƒX‚جژ‚l‚…‚”‚پ‚Œ‚Œ‚‰‚ƒ‚e‚‰‚‡‚ˆ‚”‚…‚’‚S‚جڈd—ت‚ح‚R‚P‚O‚O‚‡‚ئ”•\‚µ‚½پB‚±‚جڈd—ت‚حچإڈ¬•ھ‰ً”\‚P‚O‚O‚‡‚ج‘جڈdŒv‚ًژg—p‚µ‚ؤ‘ھ’肵‚½‚à‚جپBگ³ٹm‚ة‚ح‚R‚O‚P‚X‚‡‚إ‚ ‚ء‚½پB‚خ‚炵‚½‚آ‚¢‚إ‚ةٹeƒ†ƒjƒbƒg‚جڈd—ت‚ًگ³ٹm‚ة‘ھ’èپB‚l‚…‚”‚پ‚Œ‚Œ‚‰‚ƒ‚e‚‰‚‡‚ˆ‚”‚…‚’‚T‚جٹî‘bƒfپ[ƒ^‚ة‚·‚éپB
پ،ƒlƒW
پ@‚R‚O‚P‚X‚‡‚¤‚؟ƒlƒW‚جڈd—ت‚ح‚Q‚Q‚O‚‡پBژہ‚ة‚VپD‚Qپ“‚ًگè‚ك‚éپB
پ،ƒTپ[ƒ{
پ@ƒTپ[ƒ{‚ج‘چڈd—ت‚ح‚P‚P‚P‚O‚‡پB–ع•W‘جڈd‚ح‚P‚U‚O‚O‚‡‚©پ[پBˆï‚ج“¹‚¾پB |
| “ھ |
‚P‚S‚Q‚‡ |
کrƒ†ƒjƒbƒg |
‘«ƒ†ƒjƒbƒg |
| کr |
‚S‚W‚U‚‡‚ک‚Q |
ƒTپ[ƒ{ |
‚Q‚P‚O‚‡ |
ƒTپ[ƒ{ |
‚R‚S‚T‚‡ |
| ‘« |
‚U‚V‚W‚‡‚ک‚Q |
ƒAƒ‹ƒ~ƒtƒŒپ[ƒ€ |
‚P‚P‚O‚‡ |
ƒAƒ‹ƒ~ƒtƒŒپ[ƒ€ |
‚P‚X‚P‚‡ |
| “·‘ج |
‚R‚O‚W‚‡ |
‚`‚a‚rƒtƒŒپ[ƒ€ |
‚S‚P‚‡ |
‚`‚a‚rƒtƒŒپ[ƒ€ |
‚T‚R‚‡ |
| “d’r |
‚P‚S‚X‚‡ |
ژè |
‚X‚X‚‡ |
‘«— |
‚T‚O‚‡ |
| ‚b‚o‚t |
‚X‚Q‚‡ |
ƒlƒW |
‚Q‚U‚‡ |
ƒlƒW |
‚R‚X‚‡ |
| چ‡Œv |
‚R‚O‚P‚X‚‡ |
چ‡Œv |
‚S‚W‚U‚‡ |
چ‡Œv |
‚U‚V‚W‚‡ |
|
 |
 |
|
|
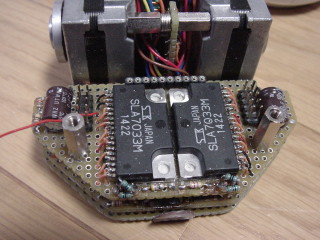
پ،ƒTپ[ƒ{ƒuƒ‰ƒPƒbƒg
پ@ƒTپ[ƒ{ƒuƒ‰ƒPƒbƒg‚جڈd—ت‚ً‘ھ’èپBƒAƒ‹ƒ~ƒTپ[ƒ{ƒzپ[ƒ“چ‚ف‚إ‚Q‚V‚‡پB‚±‚ê‚ً‚Q‚PŒآژg‚¤‚ئپA‚»‚ꂾ‚¯‚إ‚T‚U‚V‚‡پB‚¤پ[پ[‚ٌپBŒy—ت‰»ƒuƒ‰ƒPƒbƒg‚ھ—~‚µ‚‚ب‚éپB‚ئ‚è‚ ‚¦‚¸“÷”²‚«‚ة’§گي‚©‚بپDپDپD |
 |
|
پ،Œy—ت‰»
پ@‚l‚…‚”‚پ‚Œ‚Œ‚‰‚ƒ‚e‚‰‚‡‚ˆ‚”‚…‚’‚جŒy—ت‰»‚ئ•½چs‚µ‚ؤ‚l‚h‚d‚j‚Q‚O‚O‚R‚r‚o‚جŒy—ت‰»‚ًچl‚¦‚éپBٹî–{“I‚ة‚ح“d’r‚ج–{گ”‚ًŒ¸‚ç‚·‚µ‚©‚ب‚¢پBŒ»ڈَ‚ح11–{پB‚ا‚±‚©‚ـ‚إŒ¸‚点‚é‚©ƒfپ[ƒ^‚ًژو‚ء‚ؤ‚ف‚éپBŒ»ڈَ‚إ‚·‚إ‚ة‚S‚b•ْ“dپB8–{‚إ‚U‚b•ْ“dپDپDپDپ@Œ»ڈَ‚ج‰ٌکH‚إ‚ح‚±‚ج•س‚ھŒہٹE‚¾‚낤‚بپBڈd—ت‚ح‚R‚U‚‡‚µ‚©Œy‚‚ب‚ç‚ب‚¢پB‚ب‚ٌ‚¾‚©‚بپ[پB‹t‚ةƒٹƒ|4ƒZƒ‹‚¾‚ئ‚P‚O‚O‚‡Œy‚‚ب‚éپB‚V‚b•ْ“d‚ب‚ج‚إ5•ھٹش‚جƒ}ƒCƒNƒچƒ}ƒEƒX‹£‹Z‚ة‚حƒsƒbƒ^ƒٹ‚إ‚ ‚éپB‚ب‚é‚ظ‚اپ[پB |
| –{گ” |
“dˆ³ |
چإ‘ه“d—¬ |
چإڈ¬“d—¬ |
| 7 |
8.4v |
5.9A |
2.6A |
| 8 |
9.6v |
4.8A |
2.2A |
| 9 |
10.8v |
3.9A |
1.9A |
| 10 |
12.0v |
3.4A |
1.7A |
| 11 |
13.2v |
2.8A |
1.5A |
| ƒٹƒ|‚SƒZƒ‹ |
14.8V |
2.4A |
1.4A |
|
|
پ،ڈd—ت•ھگح
پ@‚l‚…‚”‚پ‚Œ‚Œ‚‰‚ƒ‚e‚‰‚‡‚ˆ‚”‚…‚’‚ة‚آ‚¢‚إ‚l‚h‚j‚d‚Q‚O‚O‚R‚r‚o‚àڈd—ت•ھگحپBچ،”N‚جگ¬‰ت‚ً’¼ژ‹‚·‚éپBٹî”آ‰»‚µ‚ؤ‚¢‚ب‚¢ƒ‚پ[ƒ^پ[ƒhƒ‰ƒCƒuƒ†ƒjƒbƒgپ{ڈ¸ˆ³ƒ†ƒjƒbƒg‚ھ‹ة’[‚ةڈd‚¢‚±‚ئ‚ھ‚ي‚©‚éپB—ˆ”N‚ح‚R‚O‚O‚‡‘ن‚جƒXƒeƒbƒpپ[ƒ}ƒEƒX‚ً‚ذ‚ئ‚آ‚ج–ع•W‚ة‚µ‚و‚¤پB
| ƒ‚پ[ƒ^پ[ |
‚P‚O‚Q‚‡‚ک‚Q |
‚b‚o‚tٹî”آ |
‚Q‚S‚‡ |
| “d’r |
‚P‚S‚V‚‡ |
ƒZƒ“ƒTٹî”آ |
‚P‚X‚‡ |
| ƒzƒCپ[ƒ‹ |
‚P‚P‚‡‚ک‚Q |
ƒ‚پ[ƒ^ƒhƒ‰ƒCƒuٹî”آ |
‚P‚R‚Q‚‡ |
|
|
چ‡Œv |
‚T‚S‚W‚‡ |
|
 |
 |
 |
 |
 |
 |
 |
|
|
|
|
|
|