| ☆特別企画☆ ノウハウ公開 Metallic Fihgter
の足裏ができるまで... |
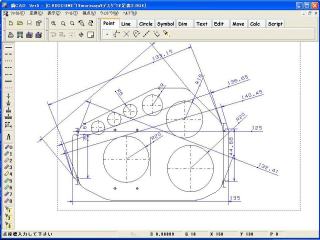
ステップ1 板加工には鍋CADというフリーのソフトを使用している。レイヤー0に図面を書く。MF5の足裏図面 |
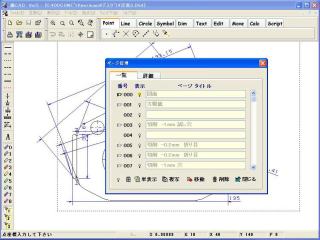
ステップ2 他のレイヤーに切削する深さや部品ごとにまとめた切削用図面を書く。 |
ステップ3 レイヤー7に書いた穴の切削図面。エンドミルの中心はこの図面に書かれた線上をなぞる。 |
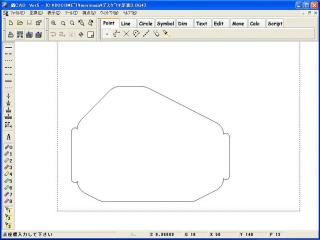
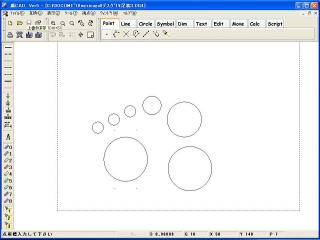
ステップ4 レイヤー8に書いた部品の外形切削図面。鍋CADのオフセット機能を使って簡単にエンドミルの半径分だけオフセットした外形切削図面を画ける。 |

ステップ5 材料を用意する。今回はA5052を使う。MODELAで加工できるように150mmx100mmの大きさにに電動糸鋸で切断する。精度を気にする必要はない |

ステップ6 材料を固定するために、材料の裏面に両面テープをはる |
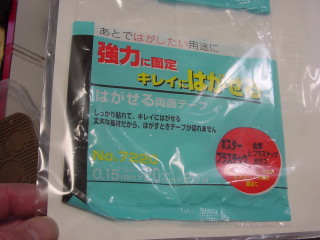
ステップ7 実は両面テープの選定が今回の企画のもっとも重要なノウハウである。私はこの両面テープを使用している。 |

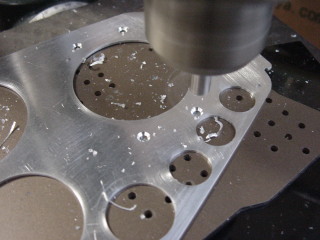
ステップ8 材料はMODELAの作業ベースに直接貼り付けるのはなく、作業ベースに貼り付けられた捨て板に固定する。写真は私が使用している捨て板。10mmのABSから削りだしている。材料をはがしやすいように10mmピッチで溝を切っている。写真のように表面がきたなくなるたびに0.1mm削って捨て板を再生する。 |

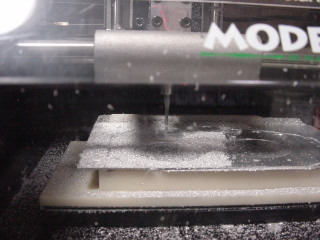
ステップ9 材料を捨て板に張り付け準備完了。普通のプリンタと同じようにレイヤーごとに印刷すると、MODELAは指定した深さまで削ってくれる。 |

ステップ10 待つこと2時間30分切削終了。 |

ステップ11 掃除機で削りかすを吸い取った直後の状態。 |

ステップ12 捨て板からワークを外す。この時点ではバリがたくさんあるが気にしない。 |

ステップ13 余分な部分を手で切り取る。薄っすらと残ったバリはアルミ箔。簡単に手で切断できる。 |

ステップ14 不必要な部分を取り除くにかかった時間はわずか30秒。ひとりで写真を撮っているのでピンボケ。まあいいか... |

ステップ15 さあ次はバリ取り。まずはバリ取り前の写真。バリ取りには400番の紙やすりと2000番相当のスポンジやすりを使う。 |

ステップ16 バリ取り終了。所要時間5分。バリはアルミ箔。あっという間にバリ取りは終わる。塗装の食いつきをよくするために表面もやすりがけ。 |

ステップ17 皿ネジ加工。勘であけるのではなくボール盤についているストッパーを活用するのがこつ。 |
ステップ18 今回は4箇所だけ。加工時間2分。 |

ステップ19 皿もみまで終了。記念撮影。 |

ステップ20 さあ次は曲げ加工だ。今回の曲げは足裏の先端を60度まげる。ボール盤についてきたバイスにワークを固定。 |

ステップ21 あて板をして... |

ステップ22 がつんと曲げる。それにしてもあて板が迷路の壁なんて... |

ステップ23 曲げ加工終了。作業時間は3分もかかっていない。こうしている間もMODELAは次の部品を削っている。 |

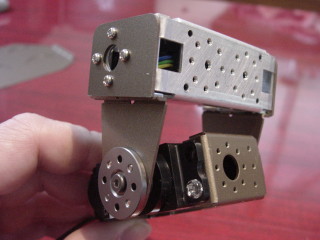
ステップ24 曲げ加工まで終了。記念撮影。 |

ステップ25 塗装の前準備。ママレモンで脱脂。 |

ステップ26 ドライヤーを使ってしっかり乾燥。 |

ステップ27 メタルプライマー登場。塗装の下地作りをする。 |

ステップ28 たっぷり塗るのがコツだそうだ。脳みそが溶けないように外でやりましょう。 |

ステップ29 冬場は寒い。ドライヤーで暖めながら乾燥。引火に注意。 |

ステップ30 いよいよ塗装。色はもちろんメタリックファイターカラー。 |

ステップ31 あっちっちになるぐらい熱しながら乾燥。引火に注意。 |

ステップ32 完成。朝9時にはじめて、この写真を撮ったのが15時。6時間の作業でした。今は17時。この企画をまとめるのに2時間もかかった。この忙しいときに... また現実逃避かー |