| 2004年8月1日(日曜日) |
■改造中
やっぱり2点倒立は手のひらを使ってが美しい。機動力を重視して板状の手で参加しようと思っていたが、何かしっくりこない。
こだわりは大切。倒立ができるロボットは増えたが、MetallicFighterの倒立が一番美しい。と私は思っている。ハンドユニット復活。
■自律性
今回、MFに搭載されたセンサはジャイロが3個、加速度センサが1個、距離センサが2個、そして各アクチュエータに内蔵されているポテンショメータ22個の合計28個。これをどう料理するかがポイント。 |
 |
■予選演技
RoboOneの公式ホームページに予選のスタートボタンは「無線、光通信などは禁止です。人の手や声で合図することは可とします。」と明記される。痛い。
MetallicFighterは第3回大会から予選演技は全て自立型で行ってきている。ただ、スタートのトリガだけは無線で行っていた。理由はスイッチが押しにくい場所に実装されていたからだ。そのためスイッチポン・スタートは行っていなかった。これはバトル中に不用意にスイッチが押されるのを防ぐためだ。相手を立てなくするには相手の電源スイッチを切るのが早い。同じように自分の電源スイッチが切られた...
しょうがない。押しやすいスイッチを増設しよう... |
|
| 2004年8月6日(金曜日) |
■決戦前日
いよいよ、明日は第6回RoboOne大会予選。予備の胸プレートと指を作る。いろいろ装飾にしてみたが、シンプルなのがMFにはあっている。そんな余裕無いはずなのに。
■規定演技と予選演技
まだ完成していない。これから24時間かけて作る最終モーションの中からベストなものを選択して大会へ望む。 |
 |
|
| 2004年8月8日(日曜日) |
■燃え尽きた
第6回RoboOne大会、結果は4位であった。満足すべき結果だったと思うが喜べる結果ではなかった。前回負けた九大チームとは決勝戦であたる組み合わせ、決勝で戦うことを約束して臨んだ本戦。彼らはちゃんと決勝まで駒を進めて優勝したのに、私は準決勝でやぶれ、3位決定戦で負け、ランブルでもお客さんを味方につけることはできず判定負け。反省点の多い結果となってしまった。
■敗因
敗因は睡眠不足による極度の思考低下。1回戦、2回戦は十分なインターバルがあったので気力を回復させることができたが3回戦のBuster-Lilacとの戦いあたりからほとんど憶えていない。今回は攻撃パターンを3つだけに絞ったのに、準決勝では試合中に攻撃のコマンドが思い出せなくなることがしばしば... 攻撃のタイミングがすべてワンテンポ遅い。これじゃ勝てない。インターバルなしで臨んだ3位決定戦。どれが充電してある電池だか判らなくなる。あれだけ人には電池管理の大切さをえらそうに伝えているのに...
ここまでの戦いは、どんなに不利な状況でも、その時点の最善の手が考えられたのに、頭が動かない、手が動かない。それが全てメタリックファイターの動きに伝わる。
あーっ、メタリックファイターの腹から何か飛び出した・・・ まあいいか
あーっ、飛び出したものがぶらさがっている・・・ まあいいか
あーっ、外れそうだ・・・ まあいいか
飛び出していたものは電池パックであった。まるで内蔵が飛び出したかのように腹からぶら下がっている。そしてせんこう花火の最後のように大きな塊が地面に落ちた。電池パックを失ったメタリックファイターは静かに崩れ落ち、眠りについた。ご苦労様・・・
■予選
今回もいろいろなことがあった。日記ネタの宝庫の日々。しかし、今回はどうしても勝ちたい相手がいた。勝負モード。いつものように日記書きに逃避する時間はない。あいた時間はすべてロボット製作に充てる。「頑張れ、頑張れ」を頭の中で連呼する日々。
今となってはなつかしい・・・
予選3時間前に手のサーボが焼ける。予備のサーボはない。これで逆立ち関係の演技や攻撃技がすべて封印された。辛い・・・。予選演技をゼロから考え直す必要に迫られる。諦めるわけに行かない。新しいモーション作りと構成の変更。寝ていない... まあいいか、予選演技はボタンを押すだけ。私は見ているだけ・・・
と思ったら、演技中はトークでアピールしなければいけなかった。メタリックファイターは懸命に演技をこなしているのに、言葉がでない、アピールができない。あれも言い忘れた、これも言い忘れた。あっという間の2分間であった。予選通過できたのか、その時点で確信することができなかった。いままでの大会で一番苦い思いをした予選であった。
選手控え室に戻らず、観客席で放心状態のまま演技観戦。レベルが高い。特にA−DOの予選演技にはしびれた。ひとつひとつのモーションに魂がはいっている。
すごい。やられた。正直な感想である。
予選は13位で通過。眠れない日が1日延びる。
■決勝
決勝前日の徹夜は辛い。予選のあと懇親会があるので血液はアルコールに代わっている。帰宅後に始めにやる作業がアルコール抜き。人生経験が長いのでアルコールの抜き方は熟知している。1時間の仮眠。夜中の12時に起きる。決戦の日の幕開けである。
まずは、無線ユニットの交換。壊れていたわけではないが、どうしても交換しておきたかった。
次は肩のサーボの交換と思ったが、予備のサーボの初期化ができない。迷ったあげく交換作業を中止。手の焼けたサーボはメタリックファイター5についているものと交換しようと思っていたが、こちらの作業も中止。理由は特にない。いままでの経験が「そのほうがよい」と助言する。交換中止。弱気なのか強気なのか微妙・・・
次は攻撃モーションの作成。得意の攻撃技は前転攻撃。前転するば相手が倒れると思われているがそんなに簡単ではない。メタリックファイター5を相手に、何度も何度も回転するタイミング、足を伸ばす角度やタイミングの調整をする。メタリックファイター5も6も傷だらけ。壊れるのが早いか、技を習得するのが早いが競争である。前転攻撃は3パターン作る。見た目には同じに見えるが、相手に応じて使い分ける。
最後は防御モーションの作成。前回は九大チームの体操パンチをまともに受け場外に転落した。その体験から、今大会のテーマを防御力に設定。ジャイロと加速度センサを使用した防御システムを作る。動かなくなったサーボモーターがあるのでモーションを作り直さなくてはいけない。練習相手は自分。何度も何度もメタリックファイターにパンチを打ち込む。人には見せられない光景である。拳が赤くなったころモーション完成。
やることはすべてやった。いや、ひとつだけやり忘れていた。寝ていなかった・・・
結果は4位、決勝で九大とやりたかった。歴史を作りたかった。まだまだ努力不足。頑張るしかない。
■写真
写真を1枚も撮っていない。文字ばっかになってしまった。ホームページや資料に掲載できる写真が欲しい... とっても欲しい... 誰か・・・ちょうだい
|
 |
|
| 2004年8月9日(月曜日) |
■プロジェクトX展
今日と明日、プロジェクトX展でRoboOne戦士の総当たり戦が行われる。私の出番は明日。アリウス、はじめロボット、九大と対戦する。
■予定
会場に行こうと思っていたが、MetallicFighterの調整に専念することにした。明日に備える。 | 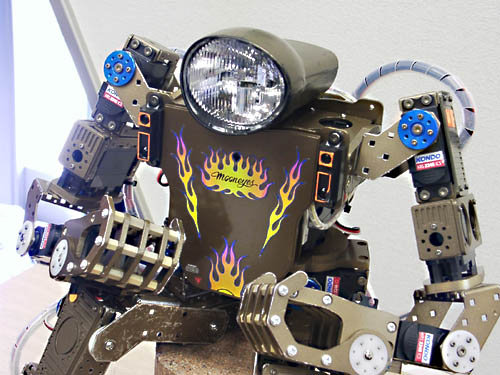 |
|
| 2004年8月10日(火曜日) |
|
|
| 2004年8月11日(水曜日) |
■速報
PCwatchに第6回RoboOne大会の記事が載る。早い・・・
ランブル戦の動画に、思わず「メタちゃん、かわいそう・・・」 |
| 2004年8月15日(日曜日) |
■映画
久しぶりに映画を見に行く。結構期待していったのだが、音が大きいだけの映画であった。残念。
■遠征用旅行バッグ
先日の大会で愛用してきた旅行バッグが壊れた。取っ手が引き出せなくなってしまったのだ。MFを2台詰め込んだせいか・・・ カバンがないと今後の遠征に支障をきたす。さっそく買い出し。ロボット用のカバンはなんでもいいというわけにはいかない。一番大切なポイントはキャスター。もともと旅行用のバッグは衣服など軽い物を入れることを前提に作られている。ロボットやパソコン、電源をぎっしり詰め込むことなんて考えていない。これらはかなりの重量になる。この重量を支えるのがキャスター。ここが樹脂製だと転がしているうちに摩擦で溶けてしまう。以前、ある大会で賞品にお米をもらい、喜んで帰る途中、キャスターが溶けてなくなってしまい大変な思いをして帰った経験がある。ということで、キャスターにボールベアリングが入っているのは必須。普通の人はカバンの中の構造をチェックするのに、私はカバンをひっくり返してキャスターの構造から確認。お店の人は・・・
次に大切なのが大きさ、小さいと機材が入らない。大きいとコインロッカーに入らない。コインロッカーに入らないと大会後打ち上げに行くのに支障をきたす。大会後の打ち上げは重要である。小さくてもたくさんの物が入るカバンのチェックポイントはカバンの角。なるべく角が丸くなっていない四角いカバンを選ぶ。
たった二つだけのポイントなのに、この条件を満たすカバンはなかなか見つからない。ようやく見つけたときはいつものくせで、思わず2個買いそうになった。危ない危ない。 |
|
|
| 2004年8月16日(月曜日) |
■リハビリ開始
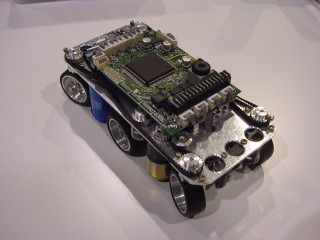
いよいよマウスシーズンである。例年ならCADを開いて今年のモデルの開発に着手するのだが今年は違う。去年のソースファイルを開く。最後にソフトを修正してから9ヶ月たっている。この間にいろいろな経験をした。9ヶ月前の私より進歩しているはず。去年のモデルを使ってそれを確かめる。
■探索速度修正
去年の探索速度は 488mm/sec 。 まずはこれを改善してみることにする。当面の目標を600mm/secに設定。さあ、頑張ろう。
|
 |
|
| 2004年8月17日(火曜日) |
■デジカメ購入
娘の誕生祝いにデジカメを購入。いろいろ悩んだが画質、機能、スタイル、を考えSONYのT11に決定。いいカメラである。I love Sony.
■探索走行
目標どおり600mm/secの探索走行(動画)ができるようになった。マイクロマウス競技では迷路のパターンが公開されていないため、1回目の走行は迷路のパターンを調べながら走行しなければならない。動画では何気なく走っているだけのように見えるが、内部では壁の情報を整理して地図を作りながらゴールへの最短経路を推測して走行している。 |
 |
|
| 2004年8月18日(水曜日) |
■機体限界
探索走行の調整の過程で、機体限界を再認識する。この機体じゃ勝てない。
■我慢
CADを立ち上げたい衝動に駆られるが、我慢、我慢。ここでCADを立ち上げたら今までと同じ繰り返し。我慢、我慢。
■袋小路対策
探索モジュールに袋小路対策を追加する。行き止まりの道を探索するのは無駄である。お客さんは迷路全体を上から見ているので袋小路の道にはいると「馬鹿だねー」という感じになる。マウスにとっては走ったことのない道。自分が進んでいる道が袋小路だと認識するのは難しい。今までは難しいからとあきらめていた項目。ハードがいじれないストレスをアルゴリズム検討にぶつける。出て来る出て来るアイディアが... 打ち出の小槌状態。よし、インプリするぞ。 |
|
|
| 2004年8月19日(木曜日) |
■ベンチマーク
袋小路対策がどのくらい有効かベンチマークすることにした。対象は過去の全国大会決勝迷路。マウスをエミュレーションモードにして前面探索してスタート地点まで戻って来るまでのステップ数と時間を実測する。
| 年代 |
袋小路対策なし |
袋小路対策あり |
効果 |
| 探索ステップ数 |
探索時間(秒) |
探索ステップ数 |
探索時間(秒) |
| 2003年 |
449 |
131 |
397 |
116 |
88% |
| 2002年 |
435 |
135 |
431 |
133 |
99% |
| 2001年 |
361 |
112 |
359 |
111 |
99% |
| 2000年 |
385 |
117 |
385 |
117 |
100% |
| 1999年 |
281 |
77 |
281 |
77 |
100% |
| 1998年 |
355 |
109 |
337 |
102 |
95% |
| 1997年 |
421 |
122 |
349 |
101 |
83% |
| 1996年 |
409 |
120 |
407 |
119 |
99% |
| 1995年 |
439 |
134 |
429 |
130 |
98% |
| 1994年 |
365 |
111 |
407 |
121 |
112% |
| 1993年 |
431 |
128 |
421 |
125 |
98% |
| 1992年 |
339 |
103 |
333 |
100 |
98% |
|
■所感
袋小路対策の目的は探索時間の短縮。全国大会の持ち時間は5分間。私は探索走行に2分、タイムアタックに30秒X4、予備として1分 と持ち時間を割り振っている。去年の迷路を走らせて「これはいけるぞ」と思ったが世の中そんなに甘くない。1994年の迷路では逆に探索に時間がかかっている。要検討といった感じだ。 |
MicroMouse2003 (The
24th All Japan)
Expert class (Final) |
MicroMouse2002 (The
23th All Japan)
Expert class (Final) |
MicroMouse2001 (The
22th All Japan)
Expert class (Final) |
MicroMouse2000 (The
21th All Japan)
Expert class (Final) |
|
|
| 2004年8月20日(金曜日) |
■戦略
袋小路対策が思ったほど効果がないため、迷路を攻め方をもうすこし工夫する必要がある。最近の戦略は
【1回目の走行】
全面探索
【2回目以降の走行】
ゴールまで最速走行をおこないゴール地点で停止
である。
以前行っていた方法は
【1回目の走行】
ゴールまでの最短経路を探索しゴールへ向かう
↓(ゴール地点に到達)
スタートまでの最短経路を探索しながらスタートへ戻る
【2回目以降の走行】
探索済みの区間だけを使ってゴールまで最速走行
↓(ゴール地点に到達)
スタートまでの最短経路を探索しながらスタートまで戻る。
であった。確実にラップタイムを刻みつつ少しずつ迷路を解析していく方法である。ただし5回の試技が終わっても真の最速経路を見つけることができないケースがしばしば発生したため、現在は全面探索法を採用している。
全面探索法の欠点は探索に時間がかかることだ。万が一探索に失敗するとあとがない。
そこで、新しい戦略を考えてみた。
戦略1:最速経路が求まるまで全面探索をする
戦略2:考えられる最速経路上に未探索の区間がある場合、その区間を探索するようにする。
一見、戦略2がよさそうにみえるが迷路探索の効率が悪くなる。全面探索の場合は、現在地点から一番近くの未探索の区間を探すようにしているため効率がものすごく良い。
最速経路上の未探索区間を優先的に探索する方法は、探索した結果が期待していたものと違うと、最速経路が変化するため次はとんでもなく遠くと未探索区間を探索するように指示される可能性がある。探索効率は悪くなる。
さあ、どうする。答えは簡単である。
上の4つの戦略を全て実装し、過去の大会迷路でベンチマークをすればよい。
今は考えるより手を動かすフェーズ。さあ、がんばろう。
|
|